
On Thursday June the 8th we played 2 matches. The first match was against Germany and the second match was against Slovenia. This day however, came with a lot of challenges…
Prematch Evaluation
Our last matches from yesterday went well, but we knew that changes needed to be made in order to get consistent performance from our robots. The robot did work, but not to their full potential yet. This is why we decided to wake up early and get to testing as soon as possible.
Problems
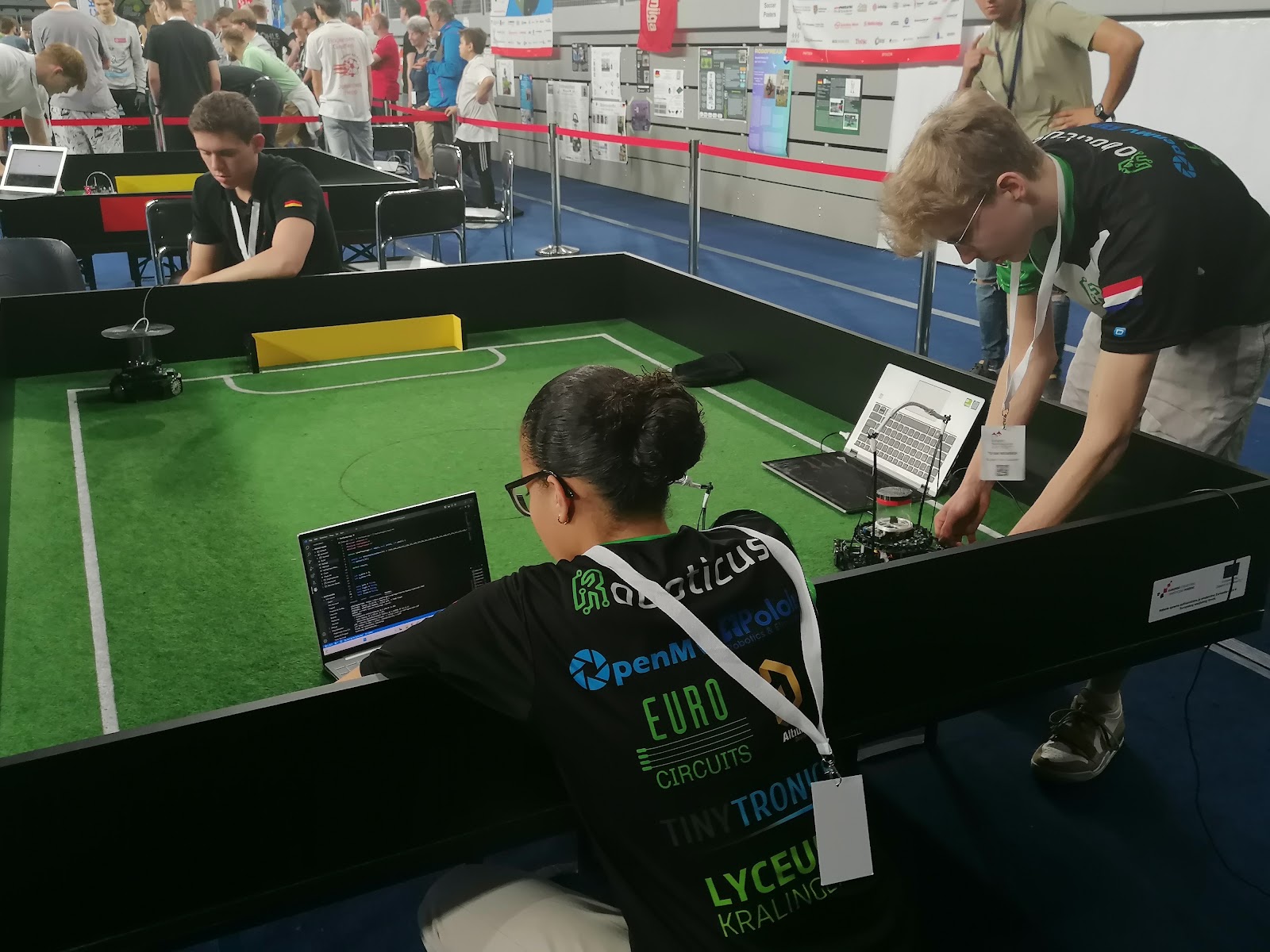
Unfortunately, things did not work in our favor. When doing the routine checks, we found out that our bottom PCB on our attacking robot had a short circuit, therefore malfunctioning. Because we arrived early at the venue we had enough time to try to fix the problem by replacing our whole PCB, but it was a stressful process and there was a lot of pressure on us because we had to play our match. After replacing our bottom PCB the issue was still not solved, and 5 minutes before the game our neopixels (light source) stopped working and had to be fixed, which our engineer fixed just in time before the start of the match.

Match One: Germany
Because many things had gone wrong in a short time, we were not looking up to this match. When the match started our robots were not performing well, our defender had issues with staying in bounds and our attacker was again malfunctioning. The result is that we had to play the match with two broken robots and this did not work out well. We lost the match by a big number. This really upset us because we know that our robots could do much better…
Troubleshooting
Despite our loss we still were determined to fix the problems, we had about 2 hours until our second match so we went to work. We swapped out our Bottom PCB once again and continued troubleshooting. After 2 hours we managed to fix our defending robot but our attacking robot was still malfunctioning.

Match Two: Slovenia
As we did not have a working attacker, we had to play a 1 v 2 matchup. Our defender however did what it had to do, it managed to defend against the two attacking robots of the opponent. But there was one problem, our defender was not programmed to score and we couldn’t change that in time. But suddenly our defender managed to score all the way from our own goal which was the first goal of the match. After some time, one robot from our opponent was damaged and could not play anymore which made it a 1 v 1 matchup again. Our defender however also malfunctioned later on which is why the opponent managed to score the 1-1 equalizer. The match ended in a very unusual way, both teams did not have functional robots anymore which is why the referees ended the match early with a 1-1 draw.

Post match evaluation
Today was a tough day, we were disappointed with the results but we knew that we could still make it up by performing well the next day against Slovakia and Italy. This is why we decided to evaluate and make a plan.





{kind=link}
{kind=link}
{kind=link}
{kind=link}